大廠技術實戰 圖像檢索技術原理及其在高德地圖的應用
在當今移動互聯網與智能技術飛速發展的時代,圖像檢索作為計算機視覺領域的一項核心技術,正從實驗室走向大規模工業應用。本文將深入剖析圖像檢索的核心技術實現,并以其在高德地圖這一國民級應用中的落地實踐為例,展現技術服務如何賦能真實場景。
一、圖像檢索:從特征到理解的技術演進
圖像檢索,顧名思義,是指從海量圖像數據庫中,根據查詢圖像的內容,快速、準確地找出相似圖像的技術。其技術路徑經歷了從傳統手工特征(如SIFT、HOG)到深度學習特征(如CNN提取的深度特征)的重大演進。
當前主流的工業級圖像檢索系統通常基于“編碼-索引-檢索”的流程:
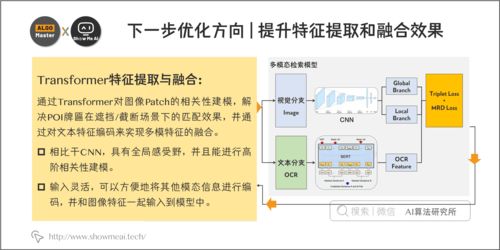
- 特征編碼:利用深度卷積神經網絡(如ResNet、VGG等)將圖像轉換為一個高維向量(即“特征向量”或“嵌入”)。這個過程本質上是將圖像的視覺語義信息壓縮到一個數值空間中,語義相似的圖像在此空間中的距離(如歐氏距離、余弦距離)更近。
- 索引構建:面對動輒上億甚至十億級別的圖像庫,逐條比對查詢向量與庫中所有向量(即“暴力搜索”)在計算上是不可行的。因此,需要構建高效的索引結構,如基于樹的方法(KD-Tree)、基于哈希的方法(LSH)以及當前主流的向量近似最近鄰搜索技術(如Facebook開源的FAISS、Google的ScaNN)。這些技術能在精度損失極小的前提下,將檢索耗時從線性級降至對數甚至常數級。
- 檢索與重排序:通過索引快速召回Top-K個候選圖像后,有時會采用更精細的模型(如基于局部特征的匹配、更深的網絡)對候選集進行重排序,以進一步提升TOP-1的準確率。
二、高德地圖中的圖像檢索:讓地圖“看懂”世界
高德地圖作為阿里經濟體在LBS(基于位置的服務)領域的核心,每天處理著海量的圖像數據,包括用戶上傳的街景、商戶照片、實時路況圖像等。圖像檢索技術在其中扮演了“智慧之眼”的角色,主要應用在以下場景:
- 地點識別與增強:用戶拍攝一張商鋪門臉、一個特色建筑或一個路口,高德可以基于圖像檢索技術,快速識別出該地點并導航至目的地。這比傳統的文字輸入更為直觀便捷,尤其適用于目標名稱不明確或語言描述困難的場景。技術實現上,高德構建了一個覆蓋數千萬POI(興趣點)的龐大街景圖像數據庫,通過檢索用戶上傳圖像與數據庫圖像的相似度,實現精準定位。
- 實景路況感知:通過與交通攝像頭等IOT設備結合,圖像檢索可以輔助識別典型交通場景(如擁堵、事故、施工圍擋)。系統定期抓取路況圖像,并與歷史圖像庫進行比對分析,能夠更智能地判斷道路狀態的異常變化,為實時路況的更新與路線規劃提供更豐富的視覺依據。
- AR導航與場景融合:在AR步行導航中,手機攝像頭實時捕捉前方道路畫面。圖像檢索技術可以快速匹配當前位置的視覺特征與預設的街景特征點,實現虛擬導航箭頭與真實世界的精準疊加,確保“指路”指引在正確的物理位置上,極大提升了導航的直觀性和可靠性。
- 地圖數據自動化生產與更新:傳統的地圖數據采集(如POI信息、道路變更)高度依賴人工。通過車載或眾包采集的連續街景圖像,利用圖像檢索與變化檢測技術,可以自動發現新開的店鋪、新修的道路或拆除的建筑,觸發數據更新流程,從而提升地圖數據的鮮活度和生產效率。
三、工程挑戰與技術服務優化
在高德這樣日均服務數億用戶的大廠應用中,技術落地遠不止算法模型本身,更面臨嚴峻的工程挑戰:
- 規模與性能:百億級別特征向量的存儲與毫秒級檢索響應。高德結合FAISS等向量檢索庫,并針對業務特點進行定制化優化(如分層索引、量化壓縮),在分布式計算平臺上實現高效穩定的服務。
- 場景化適配:不同應用場景對精度和速度的側重點不同。例如,地點識別要求極高的TOP-1精度,而AR導航則對延遲(實時性)極為敏感。技術服務團隊需要為不同場景定制差異化的特征模型和檢索策略。
- 動態更新與穩定性:地圖數據日新月異,圖像特征庫需要支持實時或準實時增量更新,同時保證在線檢索服務的平滑穩定。這需要設計精良的數據流水線與版本管理機制。
- 端云協同:考慮到用戶隱私與網絡延遲,部分輕量級檢索任務(如初步定位)可能通過端側小型模型完成,復雜檢索則在云端進行,形成高效的協同計算架構。
###
圖像檢索技術從像素匹配走向語義理解,正在深刻地改變我們與數字世界交互的方式。高德地圖的實踐表明,將前沿的計算機視覺技術與具體的業務場景(出行、位置服務)深度融合,是技術服務創造核心價值的關鍵。隨著多模態學習(融合圖像、文本、GPS信息)、三維視覺等技術的發展,圖像檢索將變得更智能、更精準,持續賦能于自動駕駛、元宇宙、智能城市等更廣闊的領域,讓機器更好地理解和服務于我們的物理世界。
如若轉載,請注明出處:http://www.j4474bb.cn/product/77.html
更新時間:2026-05-11 22:08:19